

Navigation
Autonomous navigation
AUTONOMOUS NAVIGATION WITH BVEETA MINI
MOBILE ROBOT
A navigation system is a program that provides graphical maps, coordinates or directions to a destination. Now autonomous navigation system of a mobile robot involves self-steering of a robot from one place to another based on computational resources on-board the robot.
DYNAMIC WINDOWS APPROACH (DWA) LOCAL PLANNER AUTONOMOUS NAVIGATION SYSTEM
This package provides an implementation of the Dynamic Window Approach to local robot navigation on a plane. Given a global plan to follow and a costmap, the local planner produces velocity commands to send to a mobile base. This package supports any robot who's footprint can be represented as a convex polygon or cicrle, and exposes its configuration as ROS parameters that can be set in a launch file. The parameters for this planner are also dynamically reconfigurable. This package's ROS wrapper adheres to the BaseLocalPlanner interface specified in the nav_core package. More details on TEB local planner can be found at http://wiki.ros.org/dwa_local_planner
To run DWA local planner navigation, the previous map generated based on SLAM method must be use. To get started, please follow the steps below:
1. Open new 4 terminals
2. First terminal, enter:
3. Second terminal enter:
4. Third terminal enter:
5. Fourth terminal enter:
6. In the Rviz window, open the config files in Home directory > "bveeta_rviz.riz"
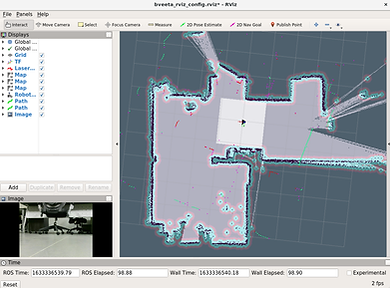
7. The Rviz layout should appear like figure below:
8. To move your robot, set the position of the robot on the map so that the laser dots is aligned closely with the pre-generated map. To set the position click the button and locate the robot on the map according its current position. This will help to localize the robot correctly before its navigate to its goal.
9. Once you satisfied with the current position on the map, next you can start to point its goal. To perform this, click the button and click anywhere on the map or the position you want the robot to go.
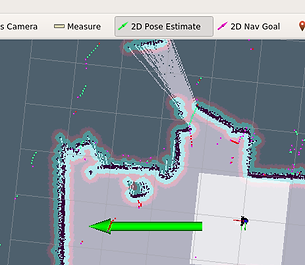
10. You will see the green line showing the global path that drives the robot to its goal as shown in figure below. Once the goal is reached, the robot will stop and wait for another instruction from user. Congratulations on your DWA local planner autonomous navigation with the Bveeta Mini.

roscore
rosrun map server map server myMap
rosrun rviz rviz
roslaunch bveeta navigation bveeta dwa local planner.launch

TRAJECTORY LOCAL PLANNER (KNOWN AS BASE LOCAL PLANNER) AUTONOMOUS NAVIGATION SYSTEM
The trajectory local planner also known as base_local_planner package provides a controller that drives a mobile base in the plane. This controller serves to connect the path planner to the robot. Using a map, the planner creates a kinematic trajectory for the robot to get from a start to a goal location. Along the way, the planner creates, at least locally around the robot, a value function, represented as a grid map. This value function encodes the costs of traversing through the grid cells. The controller's job is to use this value function to determine dx, dy, dθ velocities to send to the robot.